Simplifying Formal Verification Debugging with Auto-generated Testbenches
Formal verification is a highly effective method for ensuring the correctness of designs. Logical Equivalence Checking (LEC) is one such formal verification technique that verifies the equivalence of the logic

Road Lane Segmentation Using Deep Learning: A Complete Guide
Road lane segmentation is a cornerstone of modern autonomous driving and traffic management systems. It enables vehicles and monitoring applications to detect lane boundaries, crosswalks, and other crucial road markings
A Complete Guide to SoC Debugging | Part 4
In any complex architecture, debug and instrumentation resources are critical for multicore design. Debug instrumentation provides information for post-silicon debug analysis, software optimization, and performance monitoring.
A Complete Guide to SoC Debugging | Part 3
A debug architecture typically includes: Debug modules: Monitor or interact with the SoC's functional components. These modules are self-describing and discoverable at runtime.
A Complete Guide to SoC Debugging | Part 2
In modern System-on-Chip (SoC) designs, a debugger is connected to the SoC via dedicated debug interfaces that allow developers to access and control internal components for debugging, testing, and programming
A Complete Guide to SoC Debugging | Part 1
In today's rapidly advancing world of embedded systems, System-on-Chip (SoC) designs have become a cornerstone of modern electronics, powering everything from smartphones and wearables to automotive systems and industrial IoT
Embedded Software Design Services Explained: From Key Components to Future Trends
Embedded software plays a crucial role in enabling functionality, reliability, and performance across devices in industries from automotive to consumer electronics.
The Right Way to Implement Edge Computing for Your IoT Performance in IT
The exponential growth of the Internet of Things (IoT) has transformed the IT landscape, enabling connected devices to gather and share vast amounts of data.
Vision LLMs: Bridging the Gap Between Vision and Language
The field of Artificial Intelligence has undergone remarkable transformations, with innovations spanning natural language processing (NLP) and computer vision.
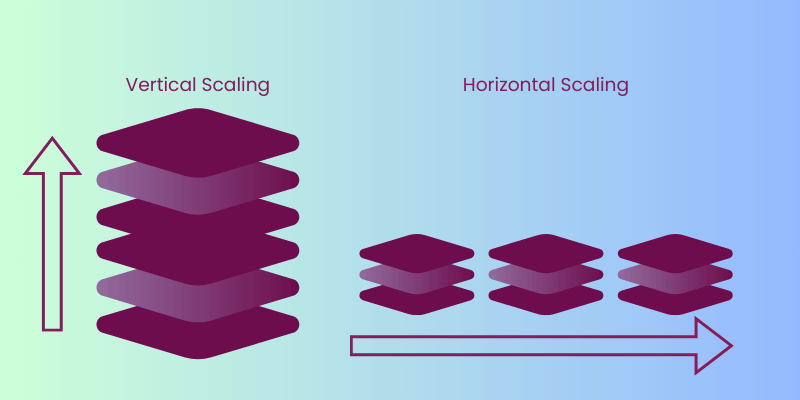
Horizontal Scaling vs. Vertical Scaling: Optimizing Your Infrastructure with AWS and Large Language Models
Imagine your startup is experiencing explosive growth. Your user base is expanding rapidly, and your servers are struggling to keep up with the increasing demand.
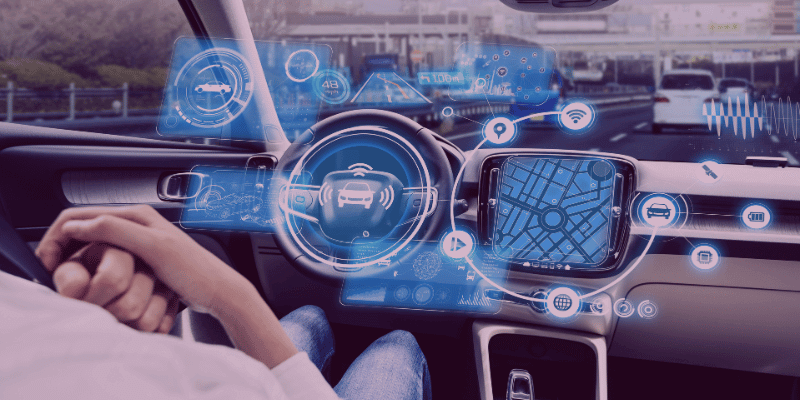
Automotive Infotainment Services: Enhancing the In-Car Experience
Automotive infotainment services are a critical part of modern vehicle design, providing a seamless blend of entertainment, communication, and navigation systems.
Graph Neural Networks Demystified: How They Work, their Applications and Essential Tools
Graph Neural Networks (GNNs) are a powerful type of deep learning model designed to handle data in the form of graphs. Unlike traditional methods, which work well with data represented
FPGA Design Services: From System Architecture to Product Testing
Field Programmable Gate Arrays (FPGAs) play a vital role in today's electronics, offering a versatile and reconfigurable platform for a wide range of applications. They find use in various industries,
Harnessing the Power of LLM Evaluation with RAGAS: A Comprehensive Guide
Large Language Models (LLMs) like GPT-4, Llama-2, Llama-3, Mistral, and Phi have changed how we handle, understand and process language. However, evaluating these models is crucial to make sure they

Trapped in the AI Echo Chamber: Unveiling the Pitfalls of Synthetic Data
Artificial Intelligence (AI) is undeniably transforming our world. From personalised recommendations on streaming platforms to life-saving diagnostics in healthcare, AI’s impact is vast and growing.
Top UVM Debugging Hacks that will transform your workflow
Debugging within the Universal Verification Methodology (UVM) framework can often feel like a daunting, time-consuming task. With complex testbenches, identifying and resolving issues can significantly slow down the verification process.

HMI Trends In Android Automotive OS | Part 2
As the automotive industry continues to evolve, the importance of enhanced UI cannot be overlooked. A key aspect of this evolution is integration of games engines and gamification tools into

HMI Trends In Android Automotive OS | Part 1
In the domain of Android Automotive OS (AAOS), Human-Machine Interface (HMI) trends are rapidly evolving to enhance user experiences within automotive environments.

























