
Business photo created by freepik.com
As the global manufacturing industry faces the pressures of bringing to market multiple variants of the highest quality products in the shortest possible time, a shift towards AI-driven automation across all functions has become inevitable.
In quality inspection, AI-driven computer vision systems are already enabling the streamlining of the production process so that the products are compliant with the quality criteria set by the company. This in turn brings in advantages of greater efficiency, lower operational costs while enabling 24/7 production and quicker decision making.
Global Tyre manufacturers have been one of the early adopters of AI-powered technology in various areas including quality assurance. One major application of AI here is defect detection in tyres using deep learning-based computer vision systems. Due to the nature of raw materials used in the tyre manufacturing process, tyre components may be contaminated by metallic or nonmetallic impurities (e.g., steel threads, screws, and plastic fragments), bubble, and overlap. When a vehicle with a defective tyre is run at high speeds, these defects lead to reduced lifetime or even blowout of the tyre.
Background
The Indian tyre industry manufactures 150+ distinct types of tyres with diameters varying from 8” to 19” and width from 400mm to 1000mm for applications ranging from bikes to cranes. To add to this, they are required to detect 80+ classes of tyre defects and are constantly struggling with a dearth of trained human resources.
Their challenges with human resources are manifold – shortage of experienced manpower, time taken in nurturing new resources to the expertise level required, person dependency in identifying the faults and repeatability as teams change. To overcome these challenges, tyre manufacturers need an automated solution for tyre quality inspection and defect detection.
In one of our customer engagements, Ignitarium engineers discovered that the major problems to be solved, to accurately detect defects in tyres were:
- Mimicking the manual test and integrating to the existing manufacturing and quality control process flow
- Having a mechanical fixture which will auto adjust to the varied tyre sizes placed by an operator and also rotate so that internal and external walls of the tyre are captured in one rotation.
- Capturing images at an optimum speed of rotation, processing, analysing and detecting the faults.
- Stopping at each faulty location and marking the defects on the tyre
- Easy and safe release of the tyre
Type of defects in tyres
Out of the 80+ classes of possible defects commonly occurring during tyre manufacturing, segregation is done to create severity sets. Various tyre manufacturers have their own specific categorisation methods based on their unique chemical recipes and mechanical manufacturing processes. Usually around 30+ of these classes are considered to be of high severity. A limited sampling of these defect classes are depicted in the images below:
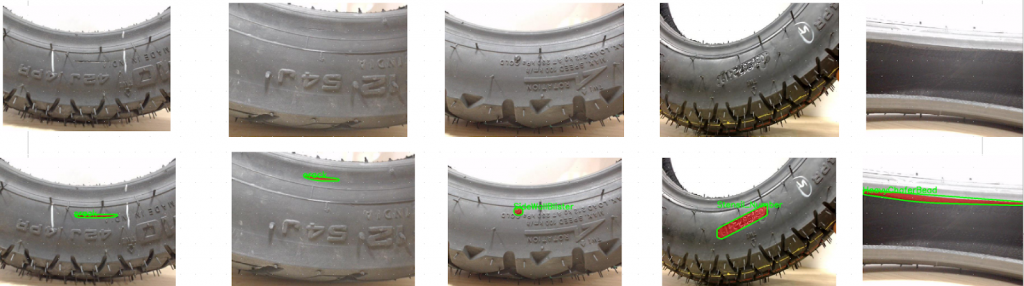
Fig 1: Tyre with Defects: Left to Right: SWC – Side Wall Crack, RLC – Rim Line Crack, SWB – Side Wall Blister, Stencil number offset, Chamfer defect
Tyre Defect Detection
A typical method of tyre quality inspection is to use X-ray machines and to use techniques like Weighted Texture Dissimilarity. However, X-ray machines require a lot of space and are very expensive. Instead, we used a RGB camera to capture images of the tyre. To solve tyre defect detection problems, instance segmentation (combination of object detection and segmentation) was chosen, so that each instance of each defect featured in the image could be identified, instead of categorizing each pixel like in semantic segmentation.
Data Generation
For data generation, images captured from multiple tyres with already identified and marked defects were used. A 1080p resolution camera was used to capture videos of faulty and ‘good’ images. Image capture was done from various angles to improve generalisation.
Data Preparation
Data preparation is the process of cleaning and transforming raw data prior to processing and analysis. It is an important step prior to processing and often involves labelling data, reformatting data and making corrections to data. The data was collected by dumping frames from several generated videos. Then the defect portions within the region of interest (ROI) were labelled using labelling tools like LabelMe.
Instance Segmentation
Instance segmentation is a technique in which an object is detected and then masked at an individual pixel level. It combines 1) Object detection, in which each individual object in a frame is classified and localized and 2. Semantic segmentation in which each pixel is segregated into pre-defined classes. Instance segmentation allows a label to be attached to each pixel of an image.
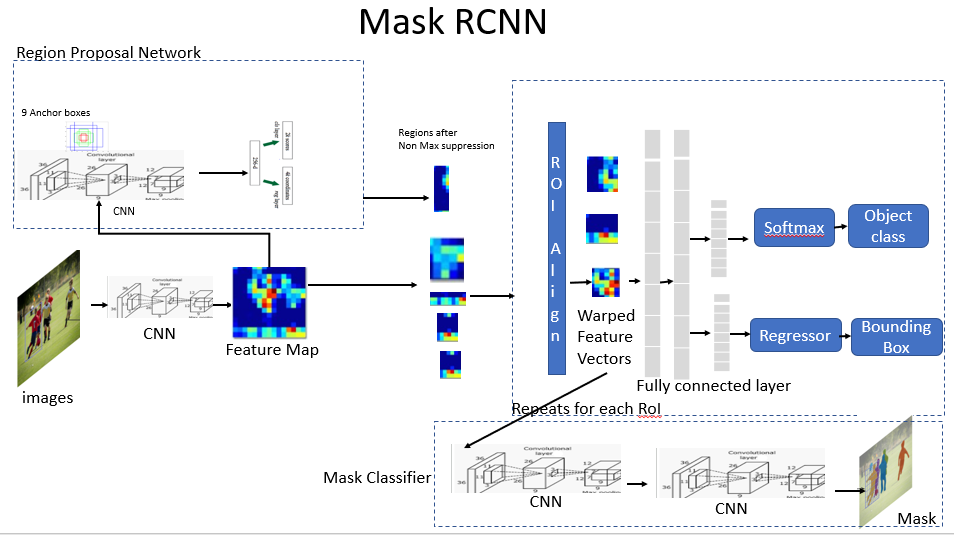
Mask-RCNN
Mask-RCNN is a deep neural network that addresses instance segmentation problems in computer vision. Mask R-CNN is a combination of two well-known network topologies – Faster R-CNN and a Fully Connected Network (FCN). Mask-RCNN follows a 2-step process. In the first step, for each input image, proposals are generated about the regions where an object might exist. In the second step, the class of the object is predicted and a pixel level mask is generated for the object based on the proposal generated from the first step.
Implementation
We build our inference pipeline using a customized variant of Mask-RCNN. The base Keras implementation can be found at https://github.com/matterport/Mask_RCNN.git and the corresponding reference paper can be found at https://arxiv.org/pdf/1703.06870.pdf
Inference Time
Inference time of the un-optimized model is listed in the following table.
| Architecture | Environment | CPUTimings | GPU Timings(Quadro P4000) |
| Mask-RCNN | Keras-TF (640*480) |
5 sec/image | 3sec/image |
With model optimization techniques, the per image latency can be reduced to less than 150ms.
Accuracy
Our customized model was able to achieve a detection accuracy of 96%.
Conclusion
This R&D effort to detect defects in tyres indicates that it is possible to achieve significant automation of the tyre quality inspection process. In a practical system, where high inspection throughput is mandatory, an automated inspection jig would be called for. This would include multiple cameras to simultaneously view the outer and inner surfaces of the tyre, a motor assembly to rotate the tyre 360 degrees and a control system that can synchronize the tyre movement, image capture and detection.


























![Source Link]](https://miro.medium.com/max/700/1*ui1roGvi_F77TY07PdaI8w.png]){kind=link}
49 thoughts on “Deep Learning based Computer Vision System for Automated Tyre Defect Detection”
HI
How many datasets have been taken for a particular defect
Your article helped me a lot, is there any more related content? Thanks!
I don’t think the title of your article matches the content lol. Just kidding, mainly because I had some doubts after reading the article.
Your point of view caught my eye and was very interesting. Thanks. I have a question for you.
Thank you for your sharing. I am worried that I lack creative ideas. It is your article that makes me full of hope. Thank you. But, I have a question, can you help me?
Thank you for your sharing. I am worried that I lack creative ideas. It is your article that makes me full of hope. Thank you. But, I have a question, can you help me?
Thank you, your article surprised me, there is such an excellent point of view. Thank you for sharing, I learned a lot. https://accounts.binance.com/en/register?ref=V2H9AFPY
acheter somniferes sans ordonnance: cialis 20mg generique – viagra gГ©nГ©rique prix
diprosone avec ou sans ordonnance: PharmaDirecte – mГ©dicaments cystite sans ordonnance
un pharmacien peut il faire une ordonnance: PharmaDirecte – cialis achat pharmacie en ligne
diarré av näringsdryck [url=http://snabbapoteket.com/#]apotek hål i öronen[/url] billigaste a kassan
betrouwbare online apotheek: Medicijn Punt – apotheek bestellen
vilken apotek Г¤r Г¶ppet nu: apotek hjalmar – apotek med hemleverans
http://snabbapoteket.com/# billigaste frakten
apotek ГҐpent pГҐ sГёndag [url=https://tryggmed.com/#]TryggMed[/url] gonore test apotek
apotheke niederlande: recept medicijnen – medicatie bestellen
halksockor vuxna apotek: SnabbApoteket – apotek snabbast leverans
http://snabbapoteket.com/# recept läkemedel online
https://tryggmed.shop/# promillemåler apotek
pluggen apotek: rensesjampo apotek – fГҐ medisiner levert hjem
online pharmacy nl [url=http://zorgpakket.com/#]Medicijn Punt[/url] farmacie online
hГҐrnett apotek: aloe vera apotek – kolloidalt sГёlv apotek
http://tryggmed.com/# løs mage apotek
sitronsyre apotek: stressball apotek – sГҐr i munnviken apotek
bestellen medicijnen [url=https://zorgpakket.shop/#]MedicijnPunt[/url] apotek online
influensavaksine 2023 apotek: tran apotek – derma roller apotek
https://zorgpakket.com/# recept medicijnen
https://snabbapoteket.com/# bilder på nagelsvamp
djevelklo apotek: amylnitritt apotek – nesespray apotek
medicijn: apotheek webshop – niederlande apotheke
recept hem [url=https://snabbapoteket.com/#]billiga rakapparater[/url] vilka djur har mens
http://snabbapoteket.com/# apotek halstabletter
medicijn recept: MedicijnPunt – medicijn bestellen apotheek
homeopati apotek: TryggMed – apotek hudpleie
vaksine apotek influensa [url=https://tryggmed.shop/#]TryggMed[/url] influensa test apotek
https://tryggmed.shop/# vannkopper apotek
https://snabbapoteket.shop/# apotek online shop
апотек: Snabb Apoteket – nГ¤ringsdryck apotek
apotek Гёrevoks: farmacia apotek – apotek ГҐpent nyttГҐrsaften
online medicijnen kopen [url=https://zorgpakket.shop/#]apotheken nederland[/url] apotheek bestellen
https://tryggmed.shop/# regulering strikk apotek
reputable indian pharmacies: IndiaMedsHub – mail order pharmacy india
https://medimexicorx.shop/# best online pharmacies in mexico
order kamagra from mexican pharmacy: buy meds from mexican pharmacy – modafinil mexico online
https://indiamedshub.com/# Online medicine order
finpecia swiss pharmacy [url=https://expresscarerx.online/#]online pharmacy free viagra samples[/url] save rx discount pharmacy
MediMexicoRx: legit mexican pharmacy without prescription – MediMexicoRx
https://expresscarerx.online/# selegiline online pharmacy
safe place to buy semaglutide online mexico [url=https://medimexicorx.shop/#]п»їmexican pharmacy[/url] MediMexicoRx